




Bộ khung cánh tay robot 4 servo
211.000₫
Mã sản phẩm: OHJO
HẾT HÀNG
Thông số kỹ thuật:
Bộ khung cánh tay robot 4 servo chất liệu: Gỗ, ốc + vít sử dụng cho lắp ghép
DỊCH VỤ & KHUYẾN MÃI LIÊN QUAN
 Cộng thêm 21 điểm tích lũy
Cộng thêm 21 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.

Chi tiết sản phẩm
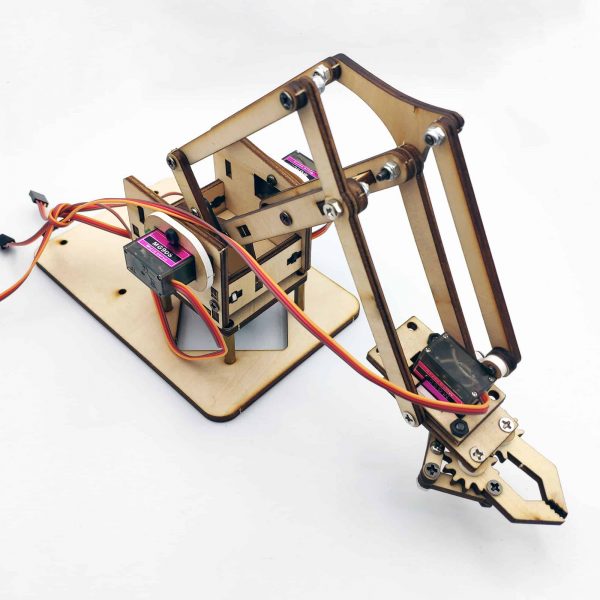
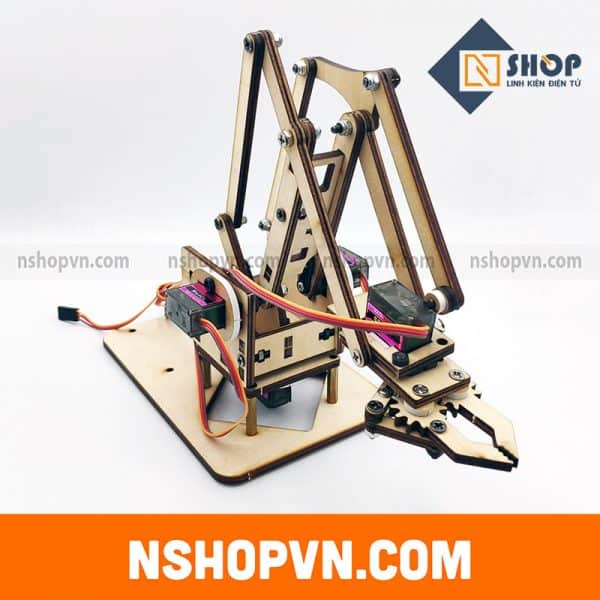
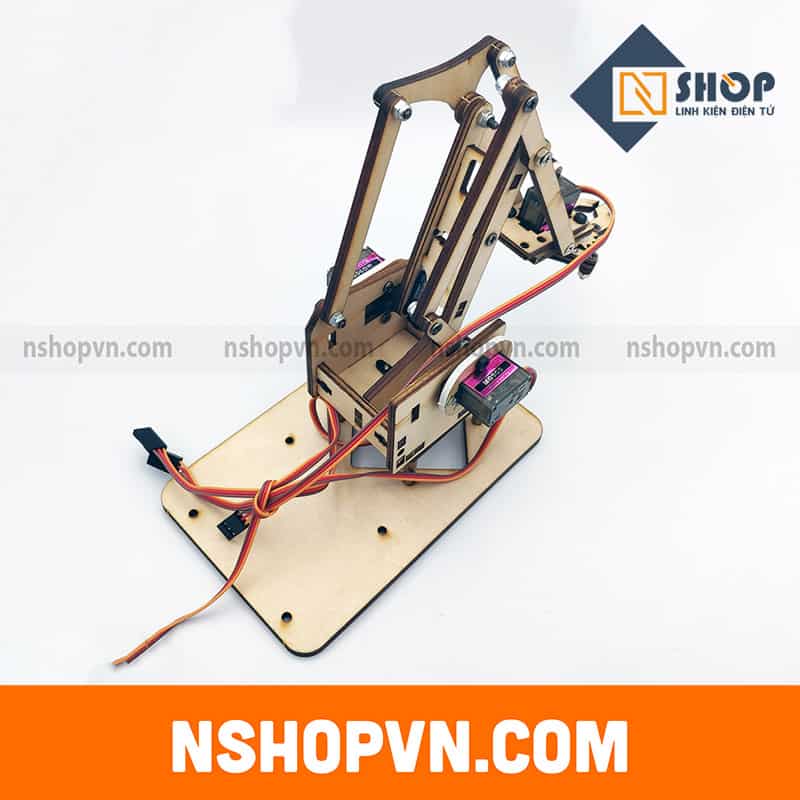
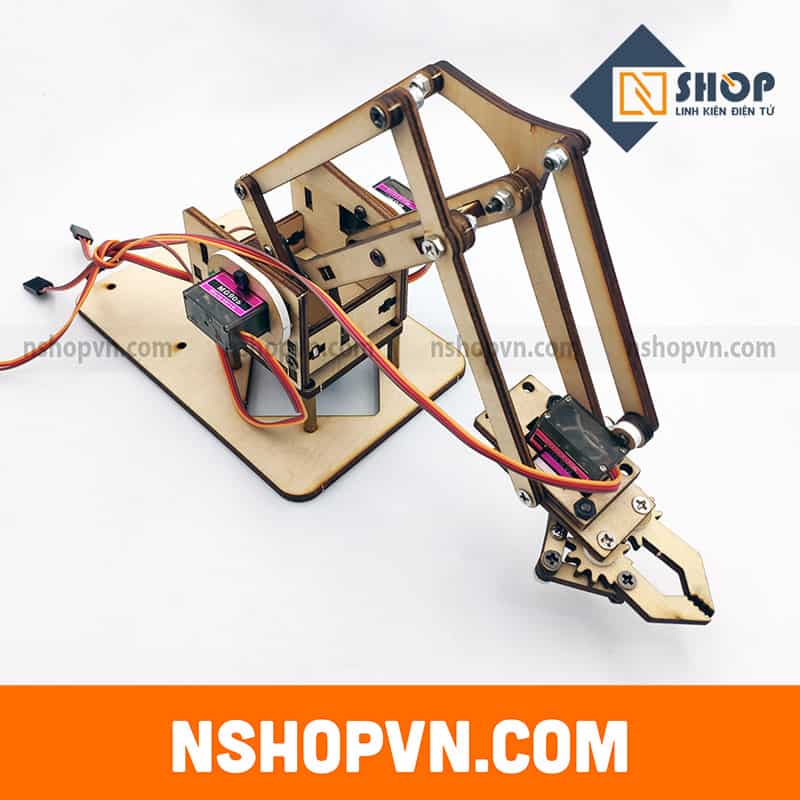
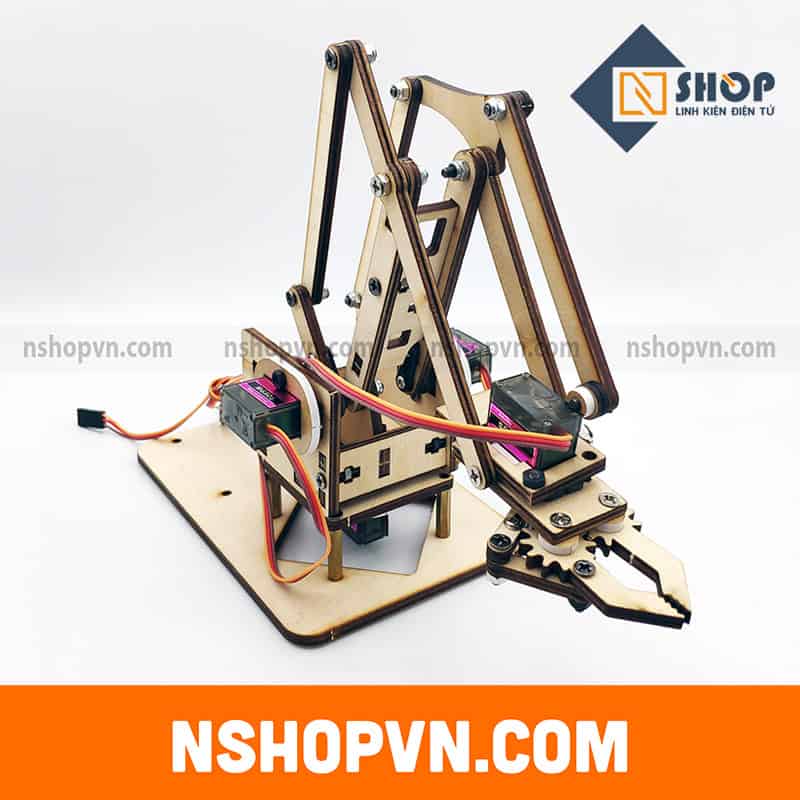
Bộ khung cánh tay robot 4 servo là bộ KIT cánh tay robot được cắt cnc. Bộ cánh tay robot sử dụng động cơ servo mg90s nhỏ gọn và hiệu dụng. Được sử dụng cho học tập và giảng dạy.
Thông số kỹ thuật:
- Chất liệu: Gỗ
- Ốc + vít sử dụng cho lắp ghép
- Sử dụng 4 servo mg90 để lắp ráp hoàn thiện
Hướng dẫn sử dụng tham khảo:
Sử dụng 2 joystick đơn kết nối với Arduino Uno để điều khiển 4 servo.
- Sau khi lắp ráp sản phẩm như hình tiến hành kết nối: Cấp nguồn ngoài cho 4 servo, nhớ kết nối chung Mass với Arduino.
- Cấp nguồn cho joystick trực tiếp từ nguồn 5V arduino, chân tín hiệu của joystick và servo được kết nối với arduino.
————————————CODE THAM KHẢO—————————————
#include <Servo.h>
Servo myservo1;
Servo myservo2;
Servo myservo3;
Servo myservo4;
int pos1=90, pos2=60, pos3=90, pos4=45;
const int right_X = A2;
const int right_Y = A5;
const int right_key = 7;
const int left_X = A3;
const int left_Y = A4;
const int left_key = 8;
int x1,y1,z1;
int x2,y2,z2;
void setup()
{
// boot posture
myservo1.write(pos1);
delay(1000);
myservo2.write(pos2);
myservo3.write(pos3);
myservo4.write(pos4);
delay(1500);
pinMode(right_key, INPUT);
pinMode(left_key, INPUT);
Serial.begin(9600);
}
void loop()
{
myservo1.attach(A1);
myservo2.attach(A0);
myservo3.attach(6);
myservo4.attach(9);
x1 = analogRead(right_X);
y1 = analogRead(right_Y);
z1 = digitalRead(right_key);
x2 = analogRead(left_X);
y2 = analogRead(left_Y);
z2 = digitalRead(left_key);
// kẹp
zhuazi();
// xoay
zhuandong();
// servo trái
xiaobi();
// servo phải
dabi();
}
//kẹp
void zhuazi()
{
//claw
if(x2<300)
{
pos4=pos4-2;
myservo4.write(pos4);
delay(5);
if(pos4<45)
{
pos4=45;
}
}
if(x2>800)
{
pos4=pos4+8;
myservo4.write(pos4);
delay(5);
if(pos4>90)
{
pos4=90;
}
}
}
//******************************************************
// xoay
void zhuandong()
{
if(x1<300)
{
pos1=pos1-1;
myservo1.write(pos1);
delay(5);
if(pos1<1)
{
pos1=0;
}
}
if(x1>800)
{
pos1=pos1+1;
myservo1.write(pos1);
delay(5);
if(pos1>180)
{
pos1=180;
}
}
}
//**********************************************************/
//servo trái
void xiaobi()
{
if(y1>800)
{
pos2=pos2-1;
myservo2.write(pos2);
delay(5);
if(pos2<15)
{
pos2=15;
}
}
if(y1<300)
{
pos2=pos2+1;
myservo2.write(pos2);
delay(5);
if(pos2>120)
{
pos2=120;
}
}
}
//*************************************************************/
// servo phải
void dabi()
{
if(y2<300)
{
pos3=pos3+1;
myservo3.write(pos3);
delay(5);
if(pos3>140)
{
pos3=140;
}
}
if(y2>800)
{
pos3=pos3-1;
myservo3.write(pos3);
delay(5);
if(pos3<30)
{
pos3=30;
}
}
}
Hình ảnh sản phẩm khi hoàn thiện:

Phản hồi khách hàng
Nshopvn.com · 07/11/2019 8:44 AM
Bộ khung cánh tay robot 4 servo | giá chỉ 211.000₫