







Cảm biến siêu âm K02 khoảng cách xa
Ngừng kinh doanh
Mã sản phẩm: N3JL
Cảm biến siêu âm K02 khoảng cách xa Điện áp làm việc DC: 3.0-5.5V. Tần số thăm dò: 40kHz. Phạm vi xa nhất 600cm
 Cộng thêm 25 điểm tích lũy
Cộng thêm 25 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.

Chi tiết sản phẩm
Mô-đun cảm biến siêu âm K02 JSN-SR0T4-2.0 có thể cung cấp chức năng cảm biến khoảng cách không tiếp xúc 20cm-600cm, độ chính xác lên đến 2mm, mô-đun bao gồm bộ cảm biến siêu âm và mạch điều khiển thu phát.
Cảm biến siêu âm đo khoảng cách khoảng cách xa, thông qua thiết kế thăm dò siêu âm thích hợp công nghiệp, chống thấm nước, hiệu suất ổn định cao và tiết kiệm
Mô-đun chính xác cao, vùng mù (20cm), đo khoảng cách ổn định là cơ sở vững chắc cho sự thành công của cảm biến này ra thị trường.
THÔNG TIN CẢM BIẾN SIÊU ÂM K02:
|
Đầu ra chiều rộng xung |
Đầu ra nối tiếp |
|
|
Điện áp làm việc |
DC : 3.0-5.5V |
|
|
Điều hành hiện tại |
Ít hơn 8mA |
|
|
Tần số thăm dò |
40kHz |
|
|
Phạm vi xa nhất |
600cm |
|
|
Phạm vi gần đây |
20cm |
|
|
Độ chính xác đường dài |
± 1cm |
|
|
Độ phân giải |
1mm |
|
|
Góc đo |
75 độ |
|
|
Tín hiệu kích hoạt đầu vào |
1 , TTL xung trên 10uS
2 , hướng dẫn truyền nối tiếp 0X55 |
|
|
Tín hiệu echo đầu ra |
Tín hiệu mức độ rộng xung đầu ra, hoặc TTL |
|
|
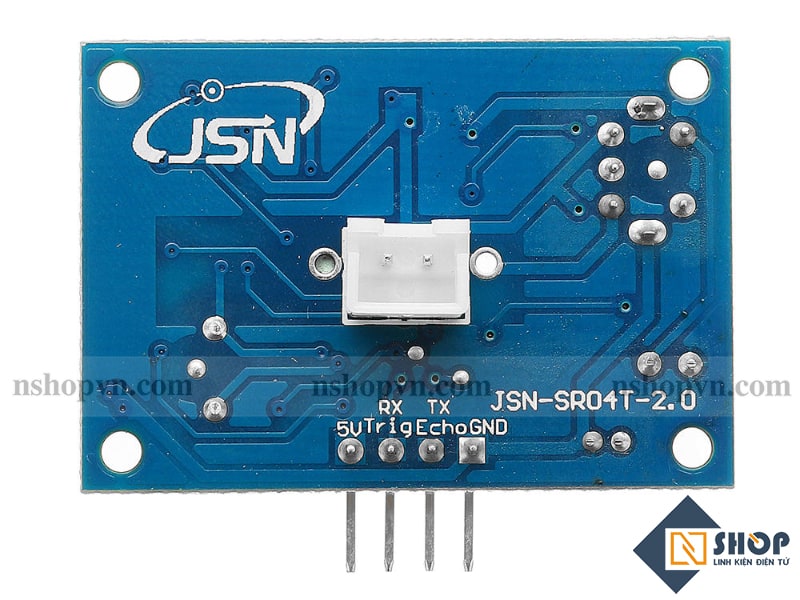
Phương thức kết nối |
3-5.5V ( điện tích cực )
Trig ( điều khiển ) RX Echo (đầu ra) TX GND (âm điện |
|
|
Kích thước sản phẩm |
L42 * W29 * H12 mm |
|
|
Nhiệt độ làm việc |
-20 ° C đến +70 ° C |
|
|
Màu sản phẩm |
PCB board là màu xanh |
|
Sơ đồ chân
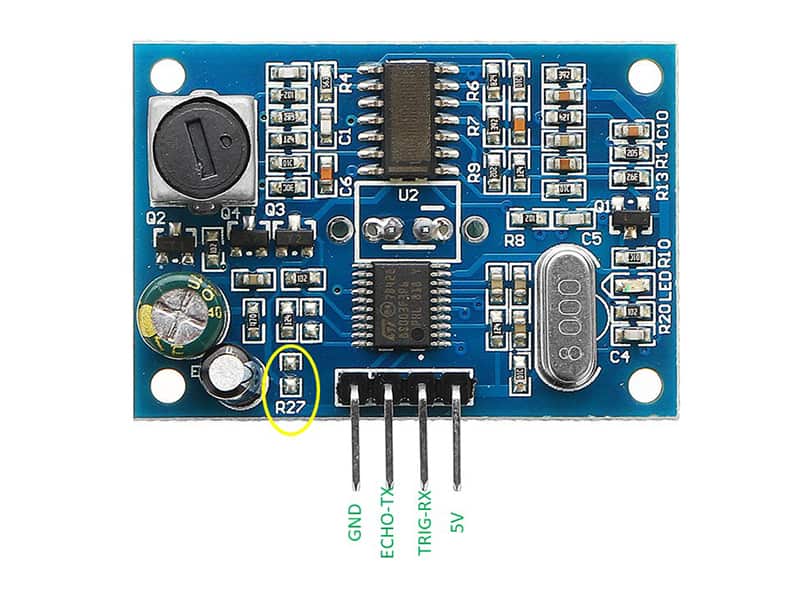
Hướng dẫn sử dụng
Cảm biến có 3 chế độ làm việc và được cấu hình trên R27 như trong hình
3.1: Chế độ làm việc cơ bản R27 = 0(không hàn)
Để đo khoảng cách, ta phát 1 xung rất ngắn (10 microSeconds) từ chân TRIG
Cảm biến sẽ phát sóng siêu âm đi và tự động kéo chân ECHO lên cao, thời gian mức cao của chân ECHO bằng với thời gian sóng siêu âm được phát đi và quay trở lại.
Công thức tính:
Khoảng cách = (thời gian mức cao chân ECHO x tốc độ âm thanh) / 2
Với : tốc độ âm thanh = 340m/s
3.2: Chế độ tự động đo là truyền dữ liệu bằng UART sau mỗi 100ms R27 = 47K
Sau mỗi 100ms thì con biến sẽ tự đo và trả thông số về thông qua sao tiếp UART(9600, n, 8, 1) với định dạng chuỗi như sau:
0XFF + H_DATA + L_DATA + SUM
trong đó:
0xFF : là chuỗi bắt đầu
H_DATA: 8 bit cao của dữ liệu
L_DATA: 8 bit thấp của dữ liệu
SUM: Chuối kiểm tra dữ liệu 0xFF + H_DATA + L_DATA = SUM (8 bit thấp)
Ví dụ : cảm biến trả về FF 07 A1 A7
SUM = A7 = (0x07 + 0xA1 + 0Xff) & 0x00ff
0x07: là 8 bit cao
0xA1 là 8 bit thấp
—-> giá trị khoảng cách là 0x07A1(hex) —-> 1953(dec)
3.3: Chế độ đo và truyền dữ liệu về sau khi nhận lệnh 0x55 R27 = 120k
Sau khi nhận chuỗi 0x55 thì cảm biến sẽ đo và trả về kết quả thông qua giao tiếp UART(9600,n,8,1) với định dạng chuỗi như sau:
0XFF + H_DATA + L_DATA + SUM
Trong đó:
0xFF : là chuỗi bắt đầu
H_DATA: 8 bit cao của dữ liệu
L_DATA: 8 bit thấp của dữ liệu
SUM: Chuối kiểm tra dữ liệu 0xFF + H_DATA + L_DATA = SUM (8 bit thấp)
Ví dụ : cảm biến trả về FF 07 A1 A7
SUM = A7 = (0x07 + 0xA1 + 0Xff) & 0x00ff
0x07: là 8 bit cao
0xA1 là 8 bit thấp
—-> giá trị khoảng cách là 0x07A1(hex) —-> 1953(dec) đơn vị mm’
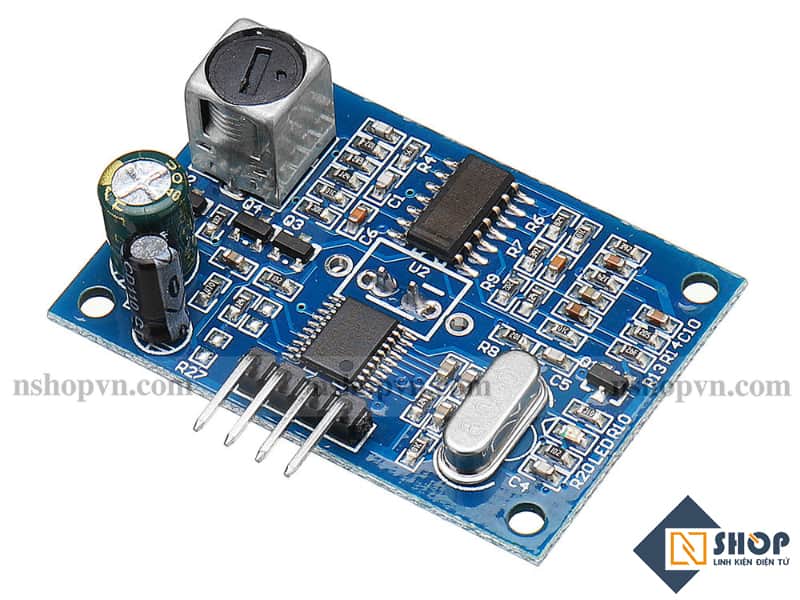
Hình ảnh thực tế của sản phẩm



——————–CODE THAM KHẢO——————
/* * Kết nối: Cảm biến Arduino VCC 5V GND GND TRIG 12 ECHO 11 Nạp code mở Serial Moitor chọn No line ending, baud 115200. * */ #include <NewPing.h> #include <MedianFilter.h> #include <Wire.h> #define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 450 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MedianFilter filter(31,0); void setup() { Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results. } void loop() { delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings. unsigned int o,uS = sonar.ping(); // Send ping, get ping time in microseconds (uS). filter.in(uS); o = filter.out(); Serial.print("Khoang cach: "); Serial.print( o / US_ROUNDTRIP_CM); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println("cm"); }
Nshopvn.com · 07/03/2019 10:49 AM
Cảm biến siêu âm K02 khoảng cách xa | giá chỉ 250.000₫