






Mạch Điều Khiển Động Cơ Bước A3967
Mã sản phẩm: 6H0S
HẾT HÀNG
Mạch Điều Khiển Động Cơ Bước A3967 nguồn từ 7V đến 20V. Tương thích với động cơ bước 4,6,8 dây với mọi mức điện áp.
 Cộng thêm 2 điểm tích lũy
Cộng thêm 2 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.
Sản phẩm liên quan





Chi tiết sản phẩm
Mạch Điều Khiển Động Cơ Bước A3967 dùng để điều khiển motor bước một cách đơn giản và dễ dàng, tương thích với bất cứ tín hiệu nào có thể xuất ra xung số từ 0 đến 5V.
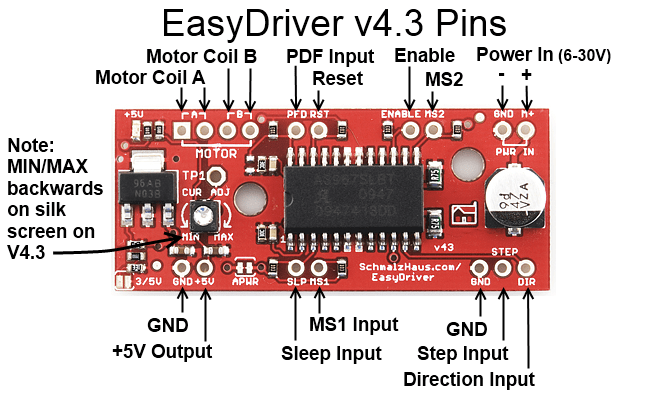
Module driver cho motor bước A3967 sử dụng nguồn từ 7V đến 20V, nguồn cấp cho motor bước bất kỳ mức nào. Trên board có tích hợp IC ổn áp có thể chọn mức nguồn 5V. Vi bước được chọn bằng MS1 và MS2 để điều chỉnh độ phân giải của vi bước.
A3967 có thể điều chỉnh vi bước
MS1 và MS2 ngắt 2 chân này ra để cài đặt vi bước 1, 1/2, 1/4, hoặc 1/8 mặc định là 1/8.
Tương thích với động cơ bước 4,6,8 dây với mọi mức điện áp.
Có thể điều chỉnh dòng từ 150mA/pha đến 750mA/pha.
SƠ ĐỒ MẠCH
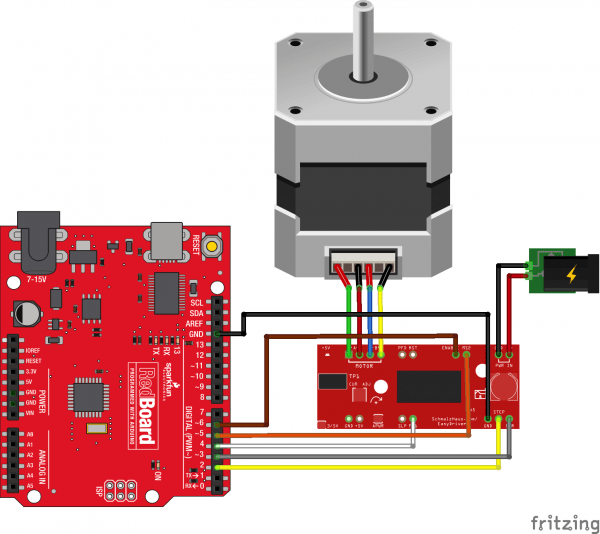
SƠ ĐỒ KẾT NỐI Mạch Điều Khiển Động Cơ Bước A3967
————————-CODE THAM KHẢO—————————–
/****************************************************************************** Kết nối: Driver Arduino step 2 dir 3 MS1 4 MS2 5 EN 6 ******************************************************************************/ //Declare pin functions on Redboard #define stp 2 #define dir 3 #define MS1 4 #define MS2 5 #define EN 6 //Declare variables for functions char user_input; int x; int y; int state; void setup() { pinMode(stp, OUTPUT); pinMode(dir, OUTPUT); pinMode(MS1, OUTPUT); pinMode(MS2, OUTPUT); pinMode(EN, OUTPUT); resetEDPins(); //Set step, direction, microstep and enable pins to default states Serial.begin(9600); //Open Serial connection for debugging Serial.println("Begin motor control"); Serial.println(); //Print function list for user selection Serial.println("Enter number for control option:"); Serial.println("1. Turn at default microstep mode."); Serial.println("2. Reverse direction at default microstep mode."); Serial.println("3. Turn at 1/8th microstep mode."); Serial.println("4. Step forward and reverse directions."); Serial.println(); } //Main loop void loop() { while(Serial.available()){ user_input = Serial.read(); //Read user input and trigger appropriate function digitalWrite(EN, LOW); //Pull enable pin low to allow motor control if (user_input =='1') { StepForwardDefault(); } else if(user_input =='2') { ReverseStepDefault(); } else if(user_input =='3') { SmallStepMode(); } else if(user_input =='4') { ForwardBackwardStep(); } else { Serial.println("Invalid option entered."); } resetEDPins(); } } //Reset Easy Driver pins to default states void resetEDPins() { digitalWrite(stp, LOW); digitalWrite(dir, LOW); digitalWrite(MS1, LOW); digitalWrite(MS2, LOW); digitalWrite(EN, HIGH); } //Default microstep mode function void StepForwardDefault() { Serial.println("Moving forward at default step mode."); digitalWrite(dir, LOW); //Pull direction pin low to move "forward" for(x= 1; x<1000; x++) //Loop the forward stepping enough times for motion to be visible { digitalWrite(stp,HIGH); //Trigger one step forward delay(1); digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again delay(1); } Serial.println("Enter new option"); Serial.println(); } //Reverse default microstep mode function void ReverseStepDefault() { Serial.println("Moving in reverse at default step mode."); digitalWrite(dir, HIGH); //Pull direction pin high to move in "reverse" for(x= 1; x<1000; x++) //Loop the stepping enough times for motion to be visible { digitalWrite(stp,HIGH); //Trigger one step delay(1); digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again delay(1); } Serial.println("Enter new option"); Serial.println(); } // 1/8th microstep foward mode function void SmallStepMode() { Serial.println("Stepping at 1/8th microstep mode."); digitalWrite(dir, LOW); //Pull direction pin low to move "forward" digitalWrite(MS1, HIGH); //Pull MS1, and MS2 high to set logic to 1/8th microstep resolution digitalWrite(MS2, HIGH); for(x= 1; x<1000; x++) //Loop the forward stepping enough times for motion to be visible { digitalWrite(stp,HIGH); //Trigger one step forward delay(1); digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again delay(1); } Serial.println("Enter new option"); Serial.println(); } //Forward/reverse stepping function void ForwardBackwardStep() { Serial.println("Alternate between stepping forward and reverse."); for(x= 1; x<5; x++) //Loop the forward stepping enough times for motion to be visible { //Read direction pin state and change it state=digitalRead(dir); if(state == HIGH) { digitalWrite(dir, LOW); } else if(state ==LOW) { digitalWrite(dir,HIGH); } for(y=1; y<1000; y++) { digitalWrite(stp,HIGH); //Trigger one step delay(1); digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again delay(1); } } Serial.println("Enter new option:"); Serial.println(); }
HÌNH ẢNH SẢN PHẨM



MỘT SỐ SẢN PHẨM MUA KÈM
https://nshopvn.com/product/dong-co-buoc-size-42-1-8-step/
Nshopvn.com · 07/03/2019 10:46 AM
Mạch Điều Khiển Động Cơ Bước A3967 | giá chỉ 26.000₫