









Remote điều khiển PS2 Không Dây ( PS2 Robot Controller )
198.000₫
Mã sản phẩm: P4KW
HẾT HÀNG
Thông số kỹ thuật:
Remote điều khiển PS2 Không Dây ( PS2 Robot Controller ) có điện áp bộ thu: 3.3VDC, sử dụng nguồn: 2 pin AAA, kết nối nhanh, phản ứng nhanh, không chậm trễ.
DỊCH VỤ & KHUYẾN MÃI LIÊN QUAN
 Cộng thêm 19 điểm tích lũy
Cộng thêm 19 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.

Chi tiết sản phẩm
Remote điều khiển PS2 Không Dây ( PS2 Robot Controller ) là bộ Remote điều khiển robot, xe thông minh, điều khiển từ xa các thiết bị phong phú. Giao tiếp với vi điều khiển ngoại vi khác, dễ sử dụng.
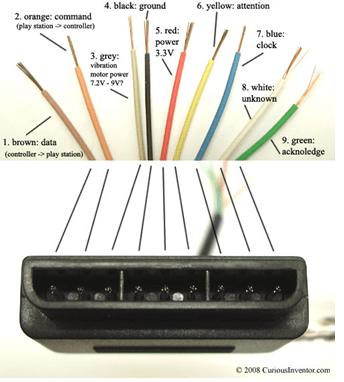
- Điện áp bộ thu: 3.3VDC
- Tay cầm PS2, vật liệu ABS chất lượng cao.
- Công nghệ nhận không dây 2.4GHz, khoảng cách có thể lên đến 10m.
- Chế độ hoạt động kỹ thuật số / analog, có thể được chuyển bất cứ lúc nào, có đèn báo
- 4-trục 12-nút thiết kế để đáp ứng nhu cầu của các nút trò chơi (chế độ kỹ thuật số: 2-trục 10 nút; chế độ tương tự: 4-trục 12 nút).
- Nút có chức năng chụp liên tục và thao tác trò chơi thuận tiện hơn.
- Hai joystick analog có độ chính xác cao để điều khiển 360 độ
- Các phím trái và phải có mỗi động cơ rung tích hợp có thể thể hiện hiệu ứng rung động tinh tế.
- Kết nối nhanh, phản ứng nhanh, không chậm trễ.
- Hỗ trợ USB1.1 / 2.0 (yêu cầu bổ sung USB để PS2 chuyển đổi)
- Hỗ trợ WIN 98 / ME / 2000 / XP / Vista
- Nguồn: 2 pin AAA
- ☆ Sản phẩm bao gồm một bộ điều khiển không dây và một bộ thu xử lý.
Hình ảnh sản phẩm



Sơ đồ đấu nối
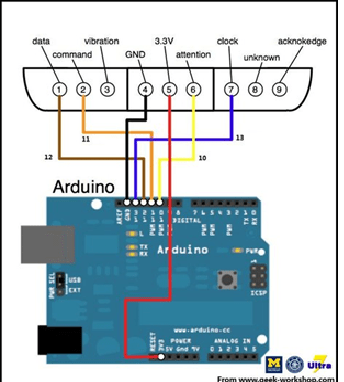
——————–CODE THAM KHẢO——————–
#include <PS2X_lib.h> //for v1.6 PS2X ps2x; // create PS2 Controller Class int error = 0; byte type = 0; byte vibrate = 0; void setup(){ Serial.begin(57600); //CHANGES for v1.6 HERE!!! **************PAY ATTENTION************* error = ps2x.config_gamepad(13,11,10,12, true, true); //setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error if(error == 0){ Serial.println("Found Controller, configured successful"); Serial.println("Try out all the buttons, X will vibrate the controller, faster as you press harder;"); Serial.println("holding L1 or R1 will print out the analog stick values."); Serial.println("Go to www.billporter.info for updates and to report bugs."); } else if(error == 1) Serial.println("No controller found, check wiring, see readme.txt to enable debug. visit www.billporter.info for troubleshooting tips"); else if(error == 2) Serial.println("Controller found but not accepting commands. see readme.txt to enable debug. Visit www.billporter.info for troubleshooting tips"); else if(error == 3) Serial.println("Controller refusing to enter Pressures mode, may not support it. "); //Serial.print(ps2x.Analog(1), HEX); type = ps2x.readType(); switch(type) { case 0: Serial.println("Unknown Controller type"); break; case 1: Serial.println("DualShock Controller Found"); break; case 2: Serial.println("GuitarHero Controller Found"); break; } } void loop(){ if(error == 1) //skip loop if no controller found return; if(type == 2){ //Guitar Hero Controller ps2x.read_gamepad(); //read controller if(ps2x.ButtonPressed(GREEN_FRET)) Serial.println("Green Fret Pressed"); if(ps2x.ButtonPressed(RED_FRET)) Serial.println("Red Fret Pressed"); if(ps2x.ButtonPressed(YELLOW_FRET)) Serial.println("Yellow Fret Pressed"); if(ps2x.ButtonPressed(BLUE_FRET)) Serial.println("Blue Fret Pressed"); if(ps2x.ButtonPressed(ORANGE_FRET)) Serial.println("Orange Fret Pressed"); if(ps2x.ButtonPressed(STAR_POWER)) Serial.println("Star Power Command"); if(ps2x.Button(UP_STRUM)) //will be TRUE as long as button is pressed Serial.println("Up Strum"); if(ps2x.Button(DOWN_STRUM)) Serial.println("DOWN Strum"); if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed Serial.println("Start is being held"); if(ps2x.Button(PSB_SELECT)) Serial.println("Select is being held"); if(ps2x.Button(ORANGE_FRET)) // print stick value IF TRUE { Serial.print("Wammy Bar Position:"); Serial.println(ps2x.Analog(WHAMMY_BAR), DEC); } } else { //DualShock Controller ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed Serial.println("Start is being held"); if(ps2x.Button(PSB_SELECT)) Serial.println("Select is being held"); if(ps2x.Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed Serial.print("Up held this hard: "); Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC); } if(ps2x.Button(PSB_PAD_RIGHT)){ Serial.print("Right held this hard: "); Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC); } if(ps2x.Button(PSB_PAD_LEFT)){ Serial.print("LEFT held this hard: "); Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC); } if(ps2x.Button(PSB_PAD_DOWN)){ Serial.print("DOWN held this hard: "); Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC); } vibrate = ps2x.Analog(PSAB_BLUE); //this will set the large motor vibrate speed based on //how hard you press the blue (X) button if (ps2x.NewButtonState()) //will be TRUE if any button changes state (on to off, or off to on) { if(ps2x.Button(PSB_L3)) Serial.println("L3 pressed"); if(ps2x.Button(PSB_R3)) Serial.println("R3 pressed"); if(ps2x.Button(PSB_L2)) Serial.println("L2 pressed"); if(ps2x.Button(PSB_R2)) Serial.println("R2 pressed"); if(ps2x.Button(PSB_GREEN)) Serial.println("Triangle pressed"); } if(ps2x.ButtonPressed(PSB_RED)) //will be TRUE if button was JUST pressed Serial.println("Circle just pressed"); if(ps2x.ButtonReleased(PSB_PINK)) //will be TRUE if button was JUST released Serial.println("Square just released"); if(ps2x.NewButtonState(PSB_BLUE)) //will be TRUE if button was JUST pressed OR released Serial.println("X just changed"); if(ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) // print stick values if either is TRUE { Serial.print("Stick Values:"); Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX Serial.print(","); Serial.print(ps2x.Analog(PSS_LX), DEC); Serial.print(","); Serial.print(ps2x.Analog(PSS_RY), DEC); Serial.print(","); Serial.println(ps2x.Analog(PSS_RX), DEC); } } delay(50); }
Phản hồi khách hàng
Nshopvn.com · 07/03/2019 10:54 AM
Remote điều khiển PS2 Không Dây ( PS2 Robot Controller ) | giá chỉ 198.000₫