Arduino Motor Shield VNH2SP30 điều khiển 2 động cơ 30A
Ngừng kinh doanh
Mã sản phẩm: BNAO
Thông số kỹ thuật:
Arduino Motor Shield VNH2SP30 Dải điện áp: 5.5v-16v, Dòng tối đa: 30A, Dòng liên tục: 14A
DỊCH VỤ & KHUYẾN MÃI LIÊN QUAN
 Cộng thêm 18 điểm tích lũy
Cộng thêm 18 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.

Chi tiết sản phẩm
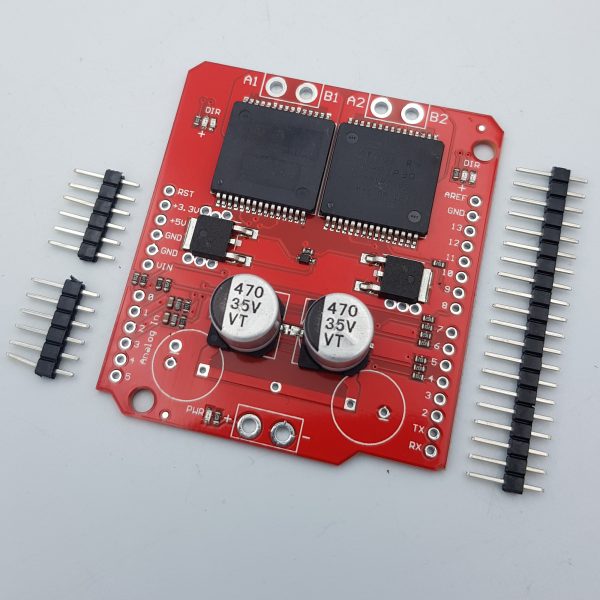
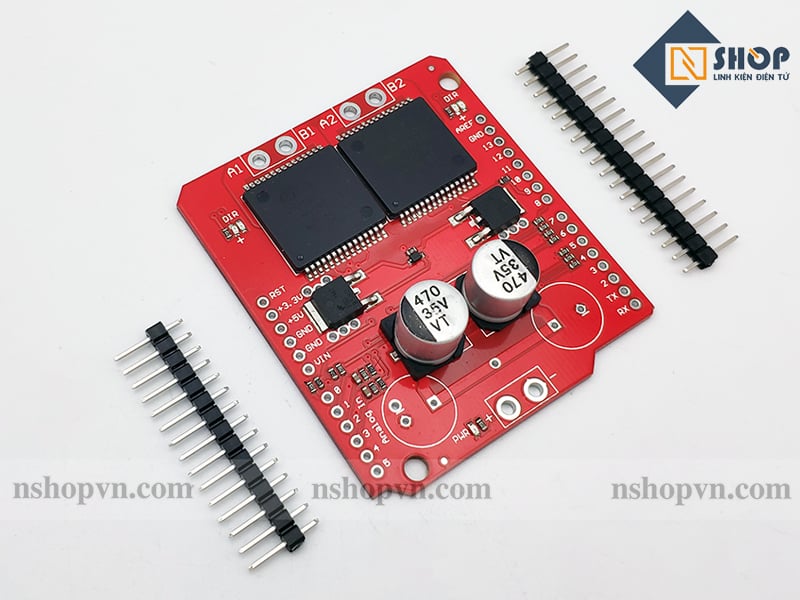
Arduino Motor Shield VNH2SP30 là một lựa chọn tối ưu mạnh mẽ thay thế cho module thông dụng L298 với 2 cầu H, module sử dụng 1 cặp IC VNH2SP30 full-bridge với khả năng tải dòng cao cho 2 motor lên đến 30A.
THÔNG SỐ KỸ THUẬT
- Dải điện áp: 5.5v-16v
- Dòng tối đa: 30A
- Dòng liên tục: 14A
- Trở kháng nội MOSFET: 19mΩ (mỗi chân)
- Tần số PWM tối đa: 20khz
- Có chân current sensor (có thể kết nối với chân analog để đo dòng)
- Bảo vệ quá dòng và quá áp
SƠ ĐỒ KẾT NỐI ARDUINO MOTOR SHIELD VNH2SP30

———————CODE THAM KHẢO———————-
/* * Cắm trực tiếp Shield lên Arduino Mega/Uno. * A1 B1 kết nối với động cơ 1. * A2 B2 kết nối với động cơ 2. * Cấp nguồn 5.5 - 16V cho Shield. * Mở Serial Monitor: * Gửi '1' dừng động cơ. * Gửi '2' quay 2 động cơ. * Gửi '3' đảo chiều động cơ. * Gửi '+' tăng tốc độ động cơ. * Gửi '-' giảm tốc độ động cơ. */ #define BRAKE 0 #define CW 1 #define CCW 2 #define CS_THRESHOLD 15 // Definition of safety current (Check: "1.3 Monster Shield Example"). //MOTOR 1 #define MOTOR_A1_PIN 7 #define MOTOR_B1_PIN 8 //MOTOR 2 #define MOTOR_A2_PIN 4 #define MOTOR_B2_PIN 9 #define PWM_MOTOR_1 5 #define PWM_MOTOR_2 6 #define CURRENT_SEN_1 A2 #define CURRENT_SEN_2 A3 #define EN_PIN_1 A0 #define EN_PIN_2 A1 #define MOTOR_1 0 #define MOTOR_2 1 short usSpeed = 150; //default motor speed unsigned short usMotor_Status = BRAKE; void setup() { pinMode(MOTOR_A1_PIN, OUTPUT); pinMode(MOTOR_B1_PIN, OUTPUT); pinMode(MOTOR_A2_PIN, OUTPUT); pinMode(MOTOR_B2_PIN, OUTPUT); pinMode(PWM_MOTOR_1, OUTPUT); pinMode(PWM_MOTOR_2, OUTPUT); pinMode(CURRENT_SEN_1, OUTPUT); pinMode(CURRENT_SEN_2, OUTPUT); pinMode(EN_PIN_1, OUTPUT); pinMode(EN_PIN_2, OUTPUT); Serial.begin(9600); // Initiates the serial to do the monitoring Serial.println(); //Print function list for user selection Serial.println("Enter number for control option:"); Serial.println("1. STOP"); Serial.println("2. FORWARD"); Serial.println("3. REVERSE"); Serial.println("4. READ CURRENT"); Serial.println("+. INCREASE SPEED"); Serial.println("-. DECREASE SPEED"); Serial.println(); } void loop() { char user_input; while(Serial.available()) { user_input = Serial.read(); //Read user input and trigger appropriate function digitalWrite(EN_PIN_1, HIGH); digitalWrite(EN_PIN_2, HIGH); if (user_input =='1') { Stop(); } else if(user_input =='2') { Forward(); } else if(user_input =='3') { Reverse(); } else if(user_input =='+') { IncreaseSpeed(); } else if(user_input =='-') { DecreaseSpeed(); } else { Serial.println("Invalid option entered."); } } } void Stop() { Serial.println("Stop"); usMotor_Status = BRAKE; motorGo(MOTOR_1, usMotor_Status, 0); motorGo(MOTOR_2, usMotor_Status, 0); } void Forward() { Serial.println("Forward"); usMotor_Status = CW; motorGo(MOTOR_1, usMotor_Status, usSpeed); motorGo(MOTOR_2, usMotor_Status, usSpeed); } void Reverse() { Serial.println("Reverse"); usMotor_Status = CCW; motorGo(MOTOR_1, usMotor_Status, usSpeed); motorGo(MOTOR_2, usMotor_Status, usSpeed); } void IncreaseSpeed() { usSpeed = usSpeed + 10; if(usSpeed > 255) { usSpeed = 255; } Serial.print("Speed +: "); Serial.println(usSpeed); motorGo(MOTOR_1, usMotor_Status, usSpeed); motorGo(MOTOR_2, usMotor_Status, usSpeed); } void DecreaseSpeed() { usSpeed = usSpeed - 10; if(usSpeed < 0) { usSpeed = 0; } Serial.print("Speed -: "); Serial.println(usSpeed); motorGo(MOTOR_1, usMotor_Status, usSpeed); motorGo(MOTOR_2, usMotor_Status, usSpeed); } void motorGo(uint8_t motor, uint8_t direct, uint8_t pwm) //Function that controls the variables: motor(0 ou 1), direction (cw ou ccw) e pwm (entra 0 e 255); { if(motor == MOTOR_1) { if(direct == CW) { digitalWrite(MOTOR_A1_PIN, LOW); digitalWrite(MOTOR_B1_PIN, HIGH); } else if(direct == CCW) { digitalWrite(MOTOR_A1_PIN, HIGH); digitalWrite(MOTOR_B1_PIN, LOW); } else { digitalWrite(MOTOR_A1_PIN, LOW); digitalWrite(MOTOR_B1_PIN, LOW); } analogWrite(PWM_MOTOR_1, pwm); } else if(motor == MOTOR_2) { if(direct == CW) { digitalWrite(MOTOR_A2_PIN, LOW); digitalWrite(MOTOR_B2_PIN, HIGH); } else if(direct == CCW) { digitalWrite(MOTOR_A2_PIN, HIGH); digitalWrite(MOTOR_B2_PIN, LOW); } else { digitalWrite(MOTOR_A2_PIN, LOW); digitalWrite(MOTOR_B2_PIN, LOW); } analogWrite(PWM_MOTOR_2, pwm); } }
HÌNH ẢNH SẢN PHẨM
Phản hồi khách hàng
Nshopvn.com · 07/03/2019 10:51 AM
Arduino Motor Shield VNH2SP30 điều khiển 2 động cơ 30A | giá chỉ 180.000₫