


Mạch Volume Xoay Rotary Encoder 360 Độ KY-040
Mã sản phẩm: FSH4
HẾT HÀNG
Mạch Volume xoay Rotary Encoder 360 độ. Điện áp sử dụng: 3~5VDC. Độ phân giải 20 xung/vòng.
 Cộng thêm 1 điểm tích lũy
Cộng thêm 1 điểm tích lũy
Đơn hàng có giá trị từ 300.000 (đ), miễn phí vận chuyển [ tối đa 15.000 (đ) ].
Đơn hàng có giá trị từ 500.000 (đ), miễn phí vận chuyển [ tối đa 35.000 (đ) ].Xem thêm các khuyến mãi vận chuyển khác.
Sản phẩm liên quan



Chi tiết sản phẩm
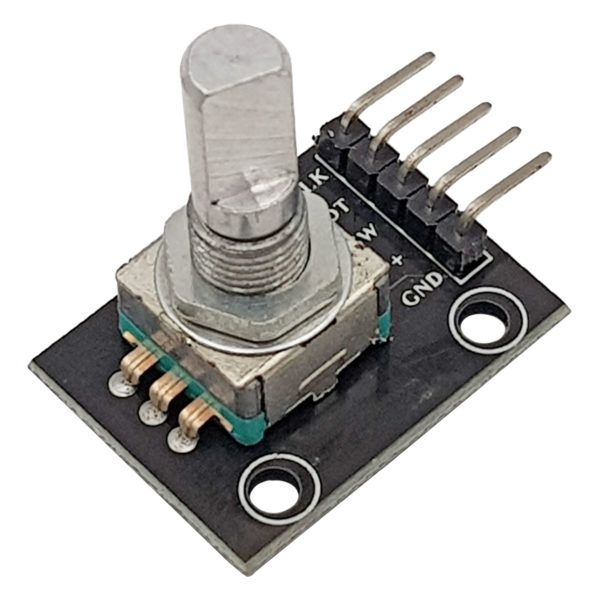
Mạch Volume xoay Rotary Encoder 360 độ không giới hạn số vòng quay, encoder đưa ra 2 xung vuông 90 độ gọi là 2 phase A và B, xung từ encoder đưa ra có thể dùng để nhận biết chiều quay, tốc độ quay, vị trí, module cung cấp 2 ngõ ra cho 2 phase và 1 ngõ ra dạng nút nhấn.
Encoder module KY-040 trông giống 1 module biến trở nhưng có ngõ ra dạng xung số. Bằng việc xoay núm vặn, ngõ ra xung của 2 kênh sẽ thay đổi với 1 độ lệch pha xác định (90 độ) giúp phân biệt được chiều xoay.
Đếm số lượng xung ngõ ra sẽ cho biết vị trí góc xoay, vị trí này là không giới hạn. Đồng thời module cũng cung cấp 1 nút nhấn có thể được lập trình để trở thành 1 nút reset giá trị đếm.
THÔNG SỐ MẠCH VOLUME XOAY ROTARY ENCODER
- Điện áp sử dụng: 3~5VDC
- Độ phân giải 20 xung/vòng.
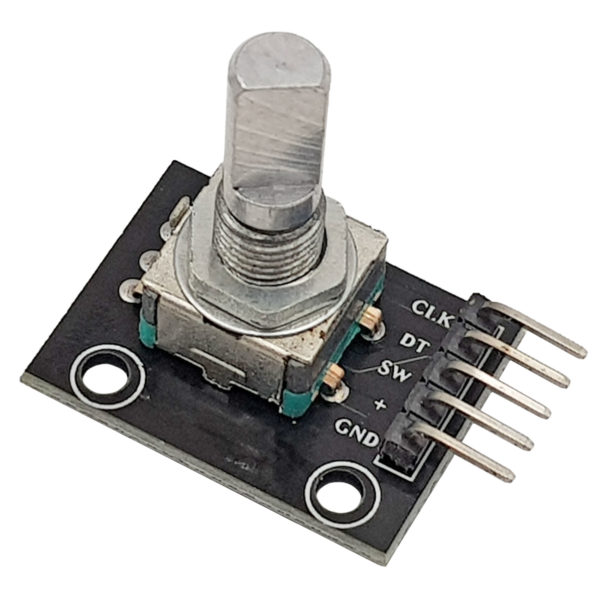
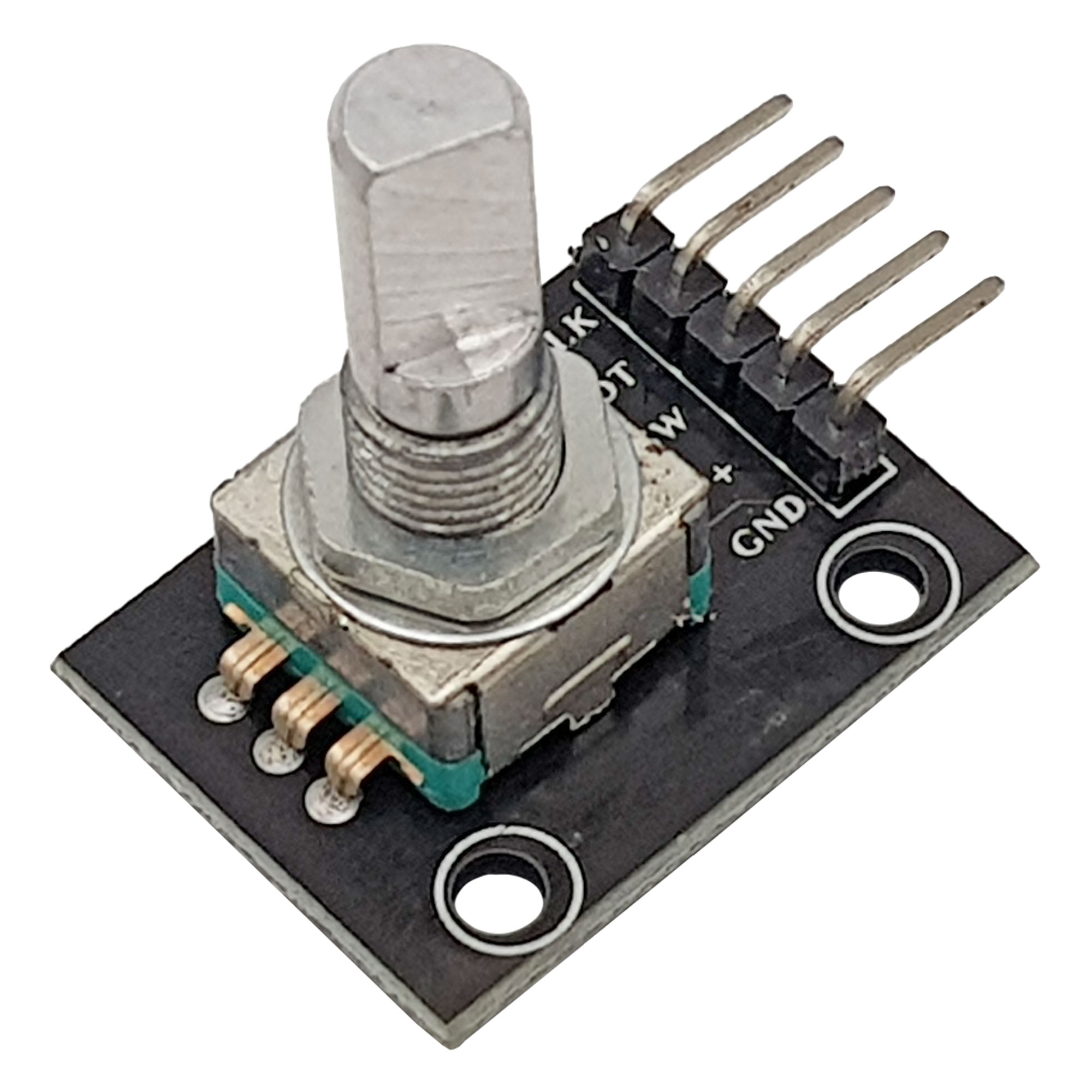
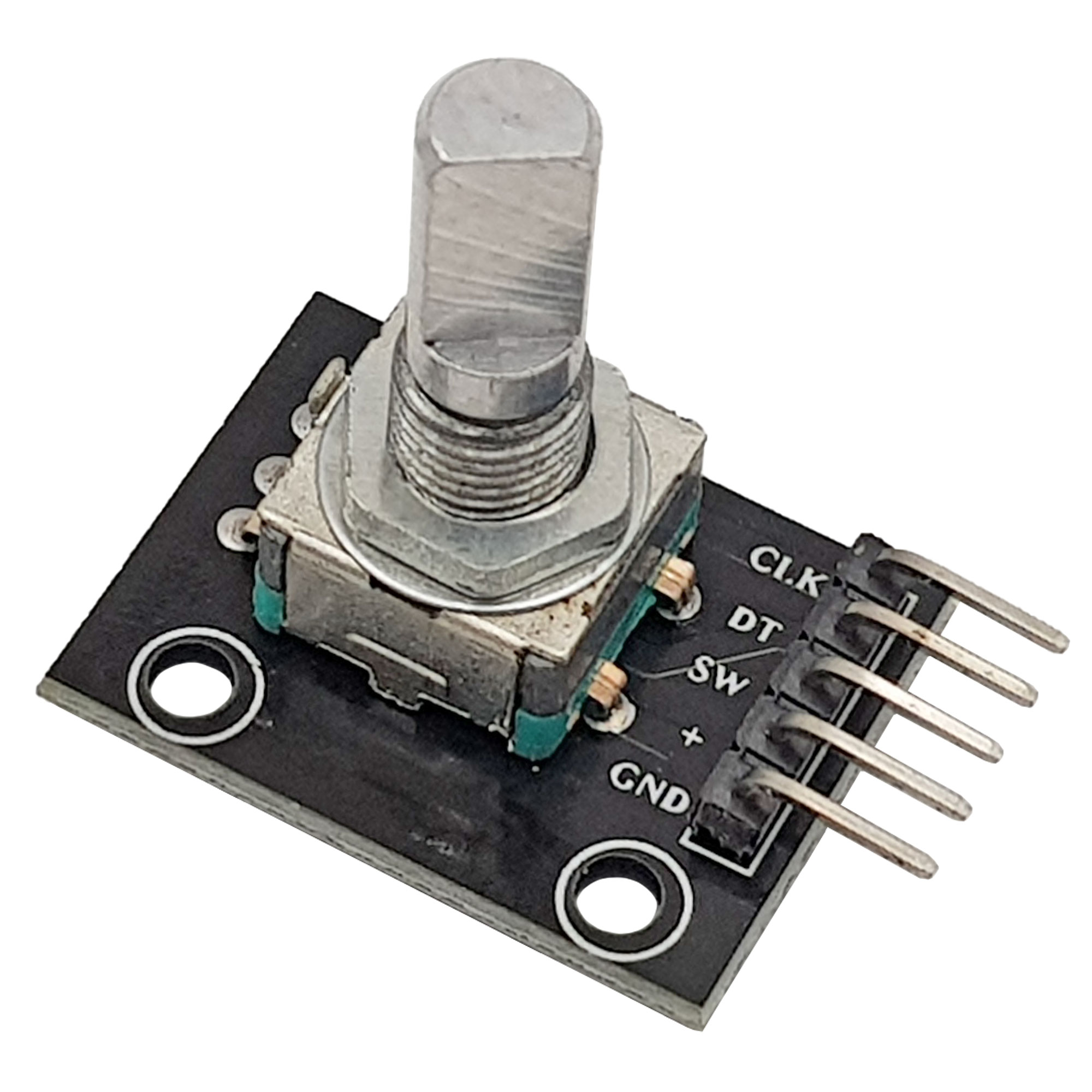
CÁC CHÂN TÍN HIỆU
- + : Chân cấp nguồn 3~5VDC
- GND: chân cấp nguồn âm 0VDC
- CLK: phase A
- DT: phase B
- SW: button
SƠ ĐỒ KẾT NỐI:

———————CODE THAM KHẢO———————
// Kết nối: // VolumeEncoder Arduino Uno R3 // GND GND // + 5V // DT 1 // CLK 0 // Nạp code mở Serial Monitor chọn No line ending, baud 9600 // Xoay volume để kiểm tra giá trị int pulses, A_SIG=0, B_SIG=1; void setup(){ attachInterrupt(0, A_RISE, RISING); attachInterrupt(1, B_RISE, RISING); Serial.begin(115200); }//setup void loop(){ } void A_RISE(){ detachInterrupt(0); A_SIG=1; if(B_SIG==0) pulses++;//moving forward if(B_SIG==1) pulses--;//moving reverse Serial.println(pulses); attachInterrupt(0, A_FALL, FALLING); } void A_FALL(){ detachInterrupt(0); A_SIG=0; if(B_SIG==1) pulses++;//moving forward if(B_SIG==0) pulses--;//moving reverse Serial.println(pulses); attachInterrupt(0, A_RISE, RISING); } void B_RISE(){ detachInterrupt(1); B_SIG=1; if(A_SIG==1) pulses++;//moving forward if(A_SIG==0) pulses--;//moving reverse Serial.println(pulses); attachInterrupt(1, B_FALL, FALLING); } void B_FALL(){ detachInterrupt(1); B_SIG=0; if(A_SIG==0) pulses++;//moving forward if(A_SIG==1) pulses--;//moving reverse Serial.println(pulses); attachInterrupt(1, B_RISE, RISING); }
HÌNH ẢNH SẢN PHẨM:
MỘT SỐ SẢN PHẨM MUA KÈM:
https://nshopvn.com/product/arduino-uno-r3-dip-kem-cap/
https://nshopvn.com/product/arduino-uno-r3-smd-chip-dan-kem-cap/
Nshopvn.com · 07/03/2019 10:44 AM
Mạch Volume Xoay Rotary Encoder 360 Độ KY-040 | giá chỉ 14.000₫