





Bộ mô hình tự ráp cửa tự động Dùng Arduino UNO R3
Mã sản phẩm: X03Q
HẾT HÀNG
– Dùng Arduino Uno R3
 Cộng thêm 65 điểm tích lũy
Cộng thêm 65 điểm tích lũy
TP.HCM: Miễn phí vận chuyển [ tối đa 35.000 (đ) ]
Tỉnh thành khác: Miễn phí vận chuyển [ tối đa 35.000 (đ) ]Xem thêm các khuyến mãi vận chuyển khác.
Sản phẩm liên quan



Chi tiết sản phẩm
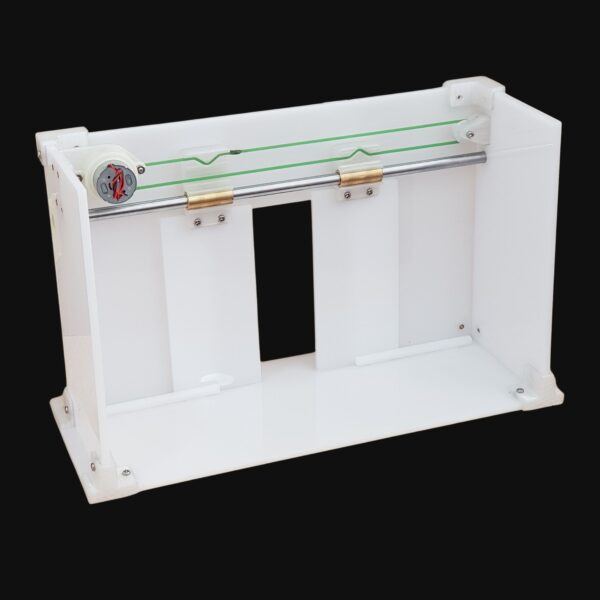
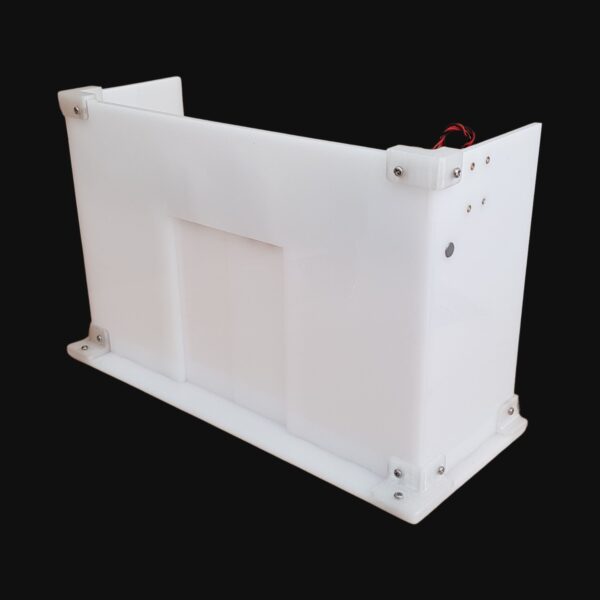
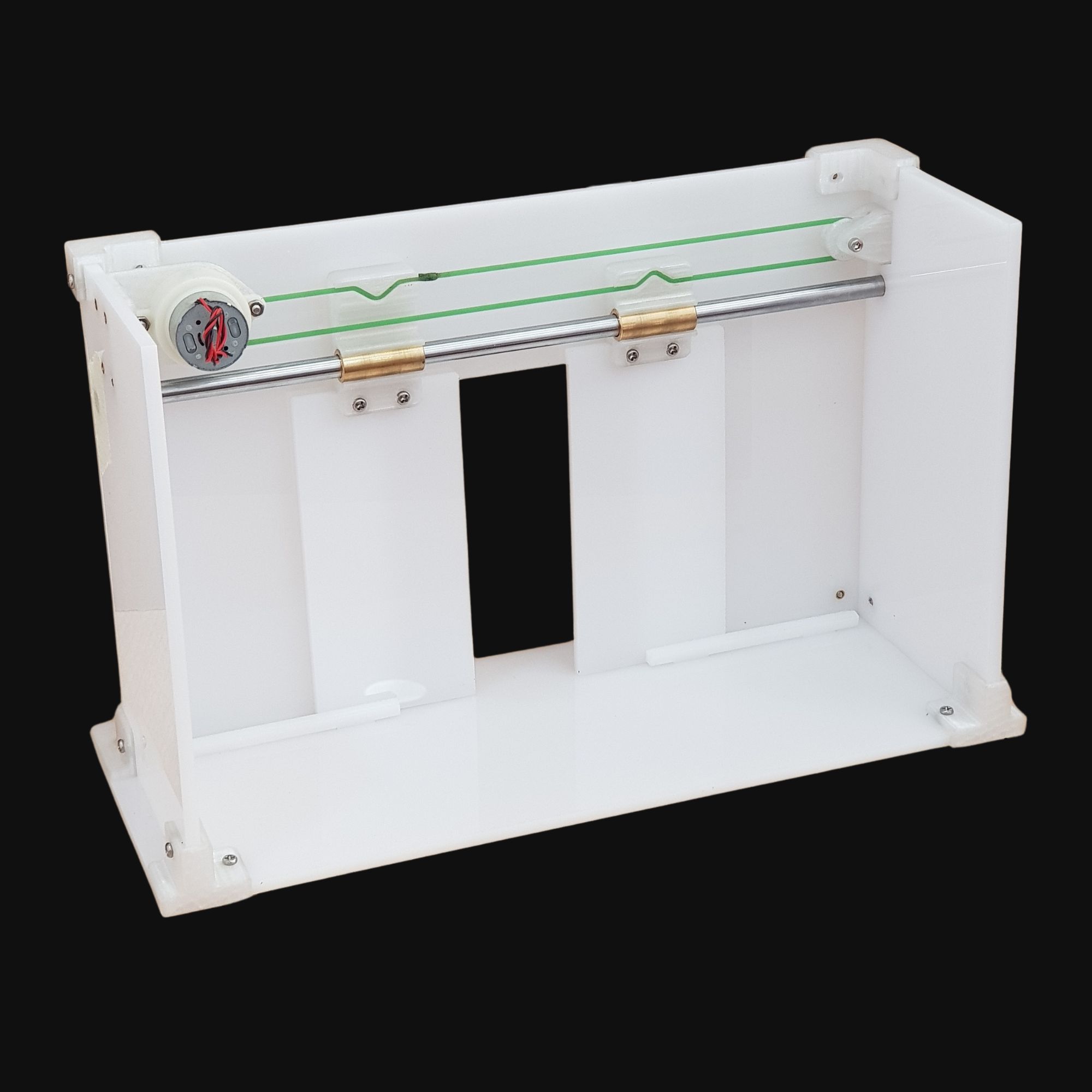
Bộ mô hình tự ráp cửa tự động bằng Arduino là một sản phẩm nghiên cứu giúp tìm hiểu về cách ứng dụng cảm biến và điều khiển động cơ trong thực tế. Hệ thống sử dụng cảm biến PIR HC-SR501 để phát hiện chuyển động và điều khiển mạch L9110S nhằm mở hoặc đóng cửa tự động.
Thông qua việc nghiên cứu mô hình này, người học có thể hiểu rõ hơn về lập trình vi điều khiển, cách kết nối và sử dụng cảm biến, cũng như nguyên lý hoạt động của động cơ trong hệ thống tự động. Quá trình thử nghiệm cũng cho phép điều chỉnh các thông số để tối ưu hiệu suất hoạt động, đồng thời mở rộng kiến thức về điều khiển thiết bị điện tử. Đây là một dự án thực hành hữu ích cho những ai muốn nghiên cứu về tự động hóa và hệ thống nhúng.
Nguyên lý hoạt động:
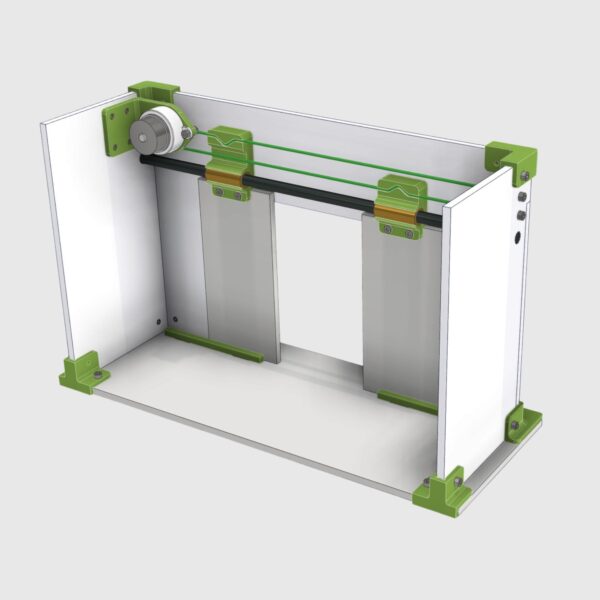
Khi một trong hai cảm biến PIR phát hiện có người tiếp cận, hệ thống sẽ ngay lập tức kích hoạt động cơ để mở cửa. Khi cửa mở hoàn toàn và chạm đến công tắc hành trình, nó sẽ giữ nguyên trạng thái mở trong 3 giây. Nếu trong khoảng thời gian này vẫn có chuyển động, cửa sẽ tiếp tục duy trì trạng thái mở. Ngược lại, khi không còn phát hiện chuyển động, sau 3 giây, cửa sẽ tự động đóng lại. Trong quá trình đóng, nếu có người xuất hiện hoặc cửa gặp vật cản khiến cửa bị kẹt, hệ thống sẽ ngay lập tức dừng và mở cửa trở lại để đảm bảo an toàn. Nếu không có sự cố nào xảy ra, cửa sẽ tiếp tục đóng cho đến khi chạm vào công tắc hành trình, hoàn tất chu trình hoạt động một cách trơn tru và an toàn.
Danh sách linh kiện:
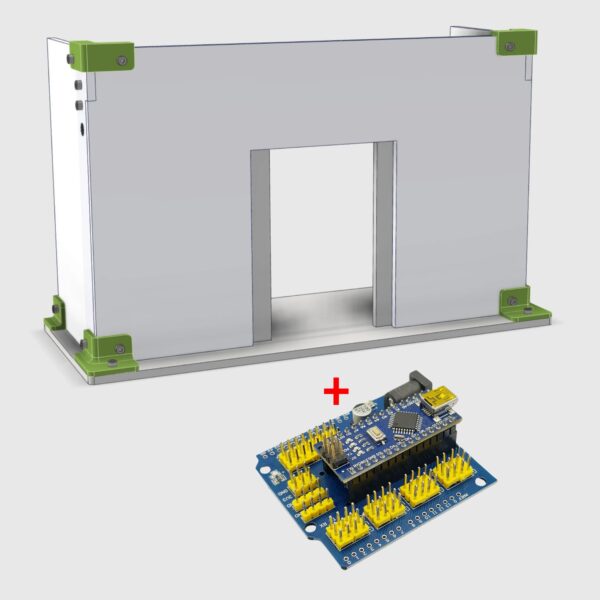
- Sử dụng Arduino Nano V3.0
- 1x Arduino Nano V3.0
- 1x Dây cáp mini Usb, cáp nano (Cáp Usb to Mini Usb)
- 1x Đế Ra Chân Arduino Nano v3
- 2x Cảm Biến Thân Nhiệt Chuyển Động PIR HC-SR501
- 1x Cảm Biến Dòng Điện Hall ACS712 5A
- 1x Mạch điều khiển động cơ DC L9110S
- 1x Động cơ giảm tốc DC JS30B 40-70RPM (3-5V)
- 2x Công tắc hành trình
- 20 Sợi dây cắm test board Cái – Cái 30Cm
- 10 Sợi Cái – Cái 10cm
- 2x Bạc trượt đồng 8mm
- 1x Trục trơn 8mm (ty , thanh trượt tròn) mạ crom 300mm
- 2x Vòng chặn trục 8mm
- 1x Nguồn adapter 9V 2A
- 30 Ốc M3x8mm
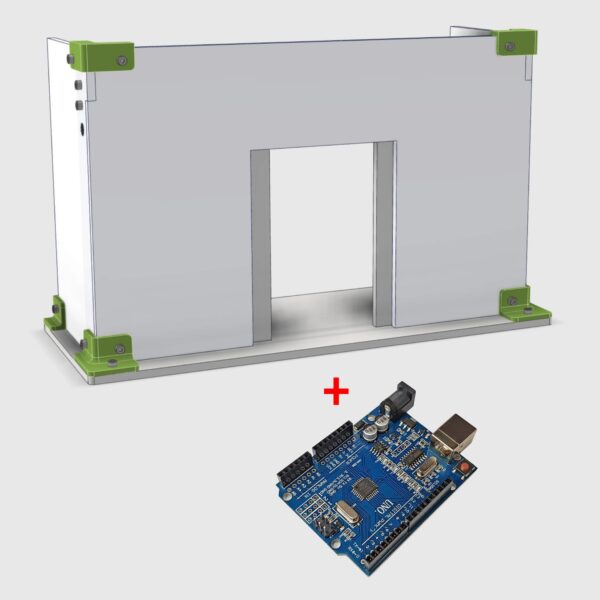
- Sử dụng Arduino Uno R3
- 1x Arduino Uno R3 chíp dán kèm cáp nạp
- 2x Cảm Biến Thân Nhiệt Chuyển Động PIR HC-SR501
- 1x Cảm Biến Dòng Điện Hall ACS712 5A
- 1x Mạch điều khiển động cơ DC L9110S
- 1x Động cơ giảm tốc DC JS30B 40-70RPM (3-5V)
- 2x Công tắc hành trình
- 30 Sợi dây cắm test board Đực – Cái 30Cm
- 2x Bạc trượt đồng 8mm
- 1x Trục trơn 8mm (ty , thanh trượt tròn) mạ crom 300mm
- 2x Vòng chặn trục 8mm
- 1x Nguồn adapter 9V 2A
- 30 Ốc M3x8mm
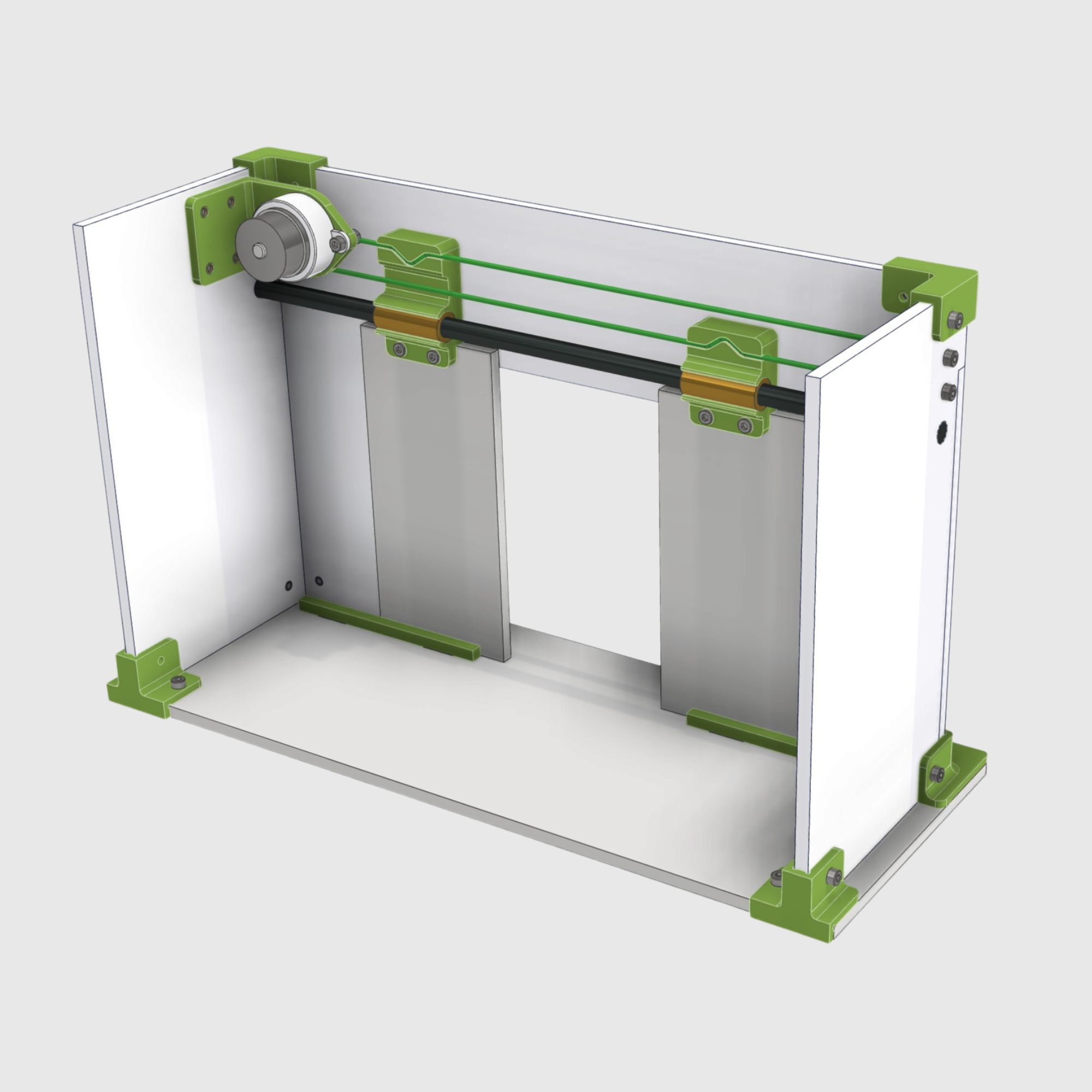
Video hướng dẫn lắp ráp phần khung:
Video hoạt động của sản phẩm:
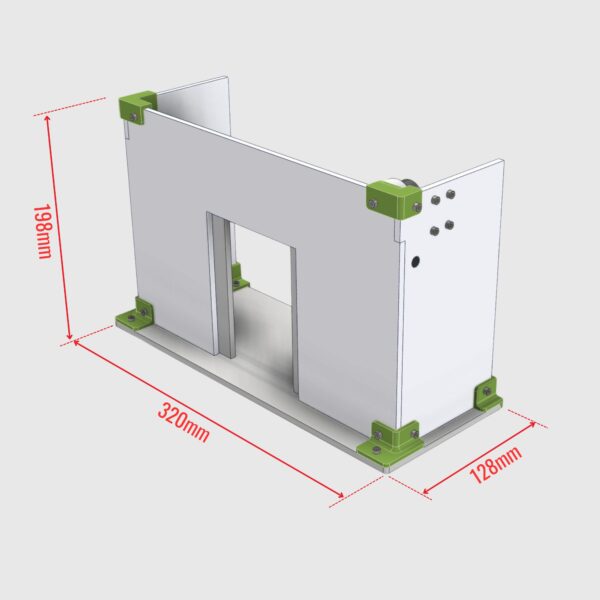
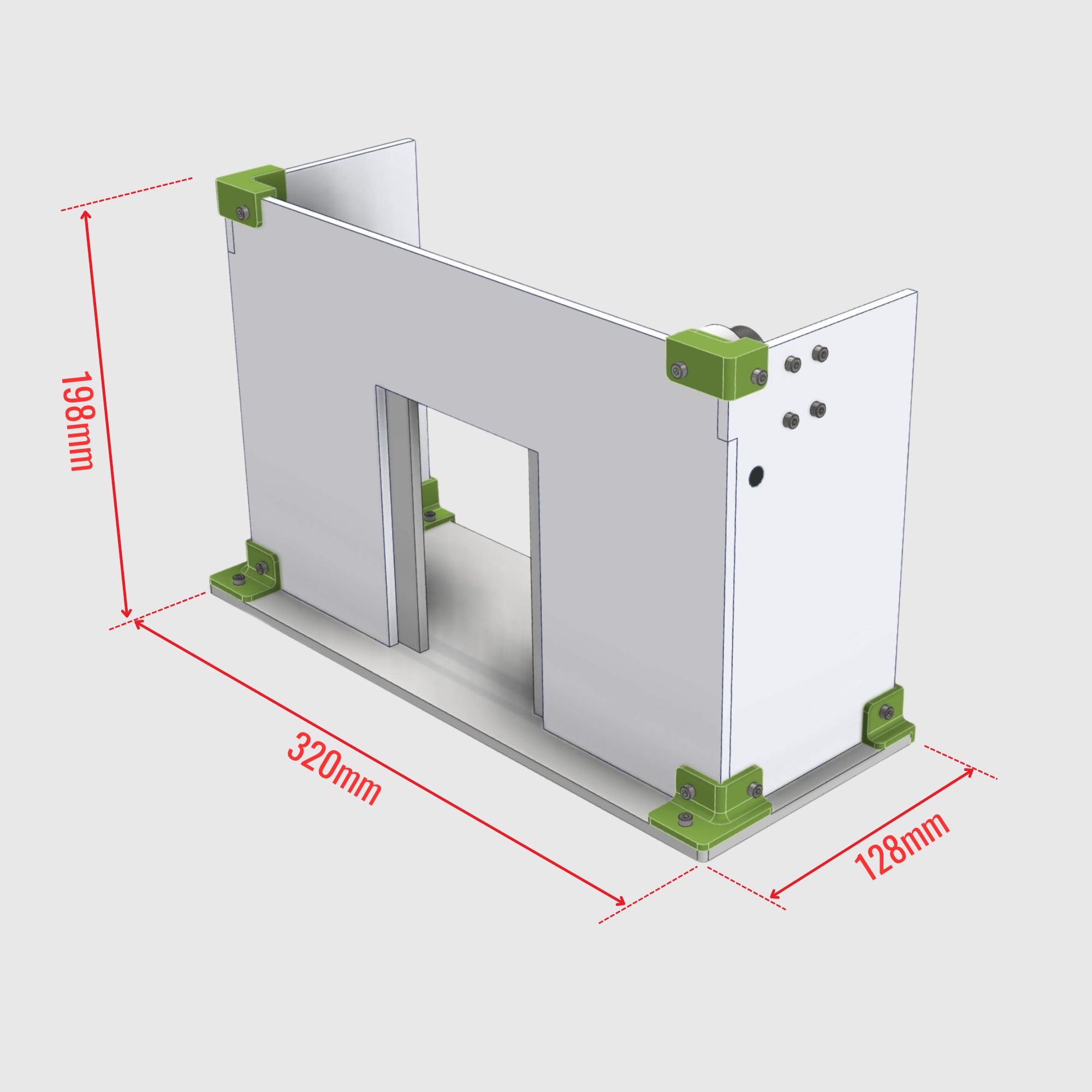
Kích thước Bộ mô hình tự ráp cửa tự động:
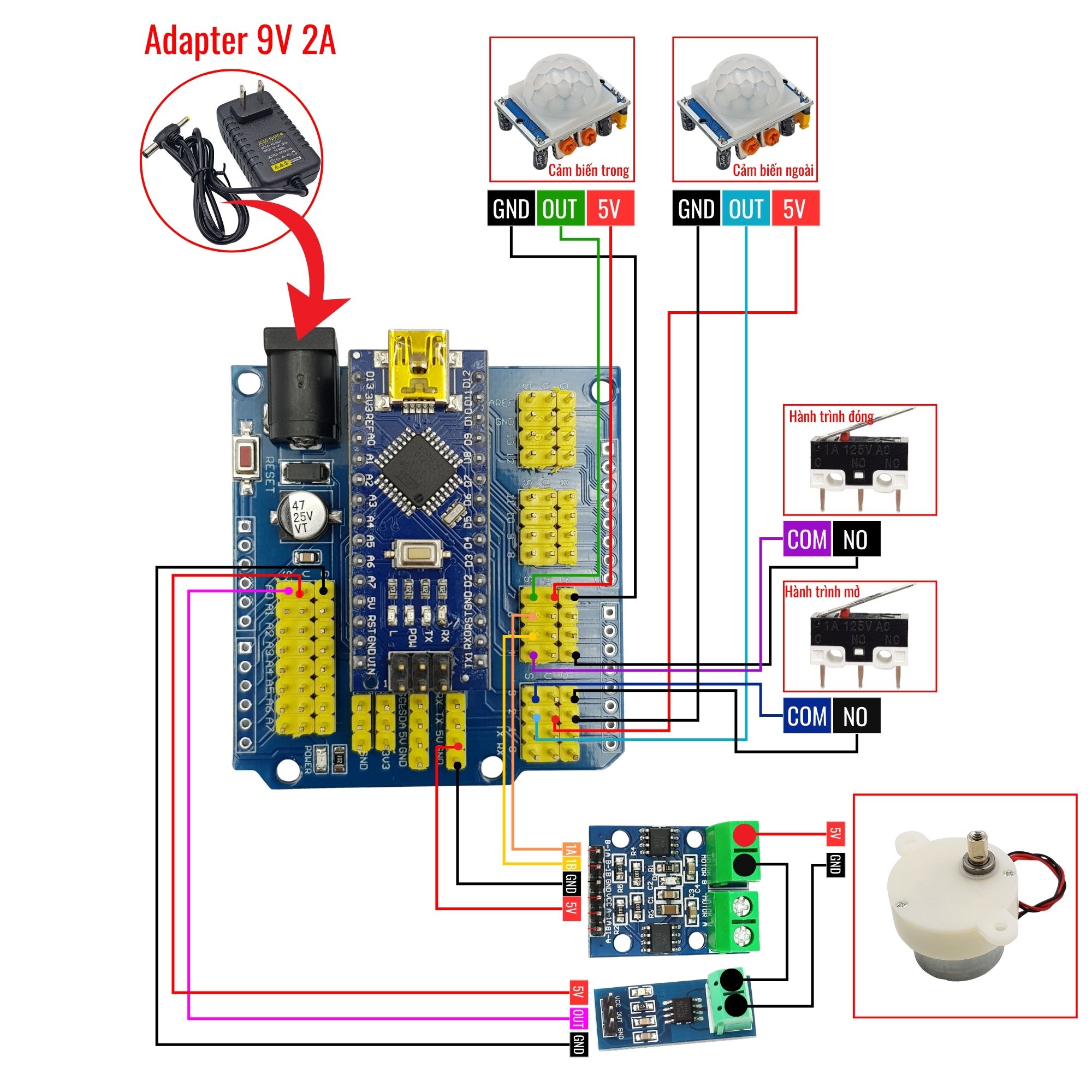
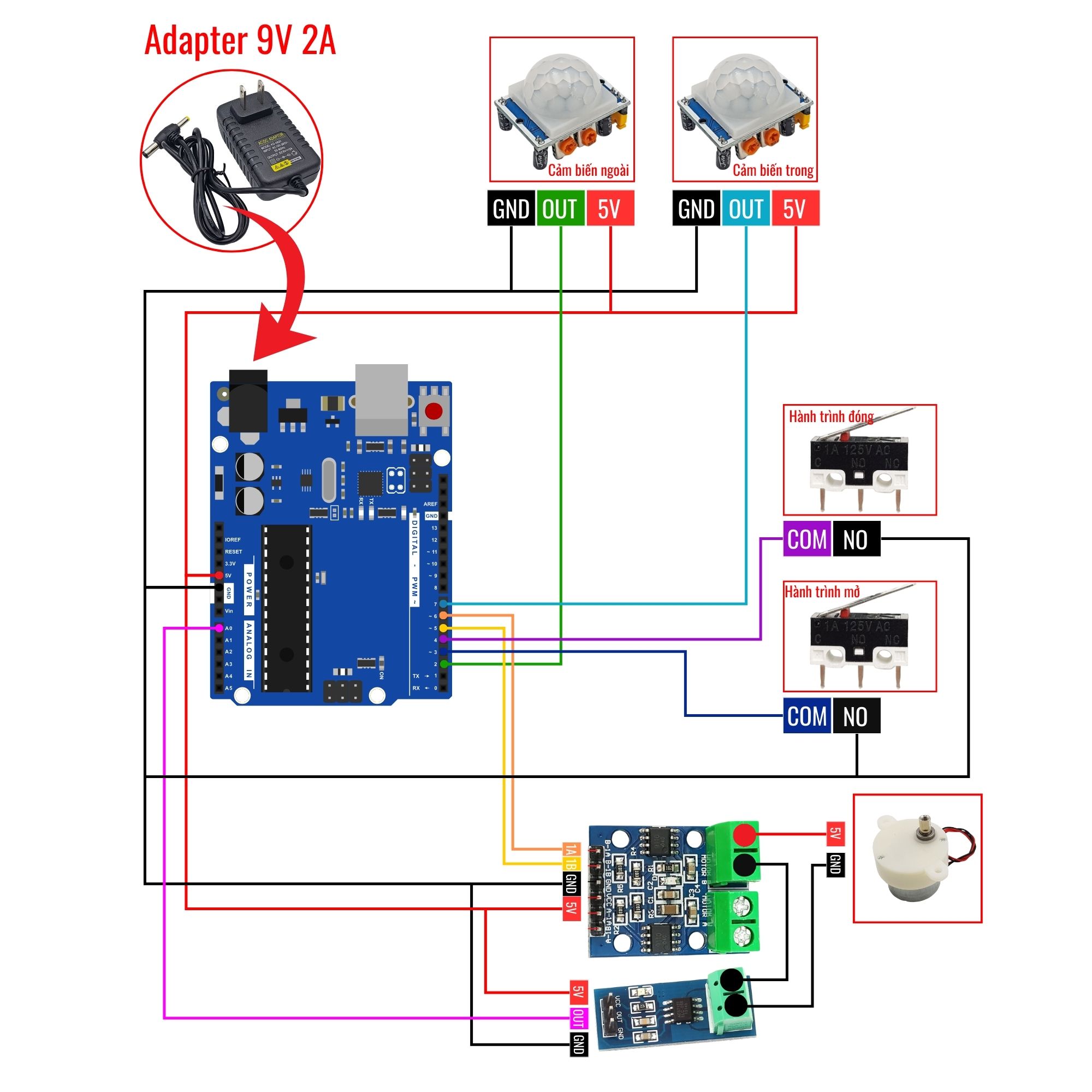
Sơ đồ đấu nối:
- Sơ đồ đấu nối với Arduino Nano V3
- Sơ đồ đấu nối với Arduino Uno R3
Code tham khảo:
#include "ACS712.h"
#define PIR_OUTSIDE 2 // Cảm biến PIR bên ngoài
#define PIR_INSIDE 7 // Cảm biến PIR bên trong
#define MOTOR_A 5 // Chân điều khiển L9110S
#define MOTOR_B 6
#define LIMIT_OPEN 3 // Công tắc hành trình mở cửa
#define LIMIT_CLOSE 4 // Công tắc hành trình đóng cửa
#define ACS712_PIN A0 // Cảm biến dòng ACS712
ACS712 sensor(ACS712_05B, ACS712_PIN); // Sử dụng ACS712 loại 5A
bool cuaDaMo = false;
unsigned long thoiGianKhongPhatHien = 0;
int dongDienchenhlech = 1; // Dòng điện chênh lệch để so sánh
int thoiGiantangdong = 1; // Thời gian phát hiện tăng dòng
int thoiGianmocua = 3000;// Thời gian cửa mở, thay đổi để mở lâu hơn
void setup() {
pinMode(PIR_OUTSIDE, INPUT);
pinMode(PIR_INSIDE, INPUT);
pinMode(MOTOR_A, OUTPUT);
pinMode(MOTOR_B, OUTPUT);
pinMode(LIMIT_OPEN, INPUT_PULLUP);
pinMode(LIMIT_CLOSE, INPUT_PULLUP);
Serial.begin(9600);
sensor.calibrate(); // Hiệu chỉnh ACS712
}
// 🏠 Hàm kiểm tra có người không
bool coNguoi() {
return digitalRead(PIR_OUTSIDE) == HIGH || digitalRead(PIR_INSIDE) == HIGH;
}
// 🔄 Hàm mở cửa
void moCua() {
Serial.println("📢 Đang mở cửa...");
digitalWrite(MOTOR_A, LOW);
digitalWrite(MOTOR_B, HIGH);
while (digitalRead(LIMIT_OPEN) == HIGH) {
if (coNguoi()) {
thoiGianKhongPhatHien = millis();
}
}
dungCua();
Serial.println("🛑 Cửa đã mở hoàn toàn!");
cuaDaMo = true;
thoiGianKhongPhatHien = millis(); // Đặt thời gian chờ trước khi đóng
}
// 🔄 Hàm đóng cửa có kiểm tra kẹt
void dongCua() {
Serial.println("🔄 Đang đóng cửa...");
float tongDongDien = 0;
int soLanDo = 0;
unsigned long thoiGianBatDauTangDongDien = 0;
while (digitalRead(LIMIT_CLOSE) == HIGH) {
digitalWrite(MOTOR_A, HIGH);
digitalWrite(MOTOR_B, LOW);
float dongDienHienTai = doDongDien();
soLanDo++;
tongDongDien += dongDienHienTai;
float dongDienTrungBinh = tongDongDien / soLanDo;
if (coNguoi()) {
Serial.println("🚨 Phát hiện người! Dừng đóng cửa.");
dungCua();
delay(100);
moCua();
return;
}
if (dongDienHienTai - dongDienTrungBinh > dongDienchenhlech) {
if (thoiGianBatDauTangDongDien == 0) {
thoiGianBatDauTangDongDien = millis();
} else if (millis() - thoiGianBatDauTangDongDien > thoiGiantangdong) {
Serial.println("⚠️ Động cơ bị kẹt! Mở cửa lại...");
dungCua();
delay(100);
moCua();
return;
}
} else {
thoiGianBatDauTangDongDien = 0;
}
}
dungCua();
Serial.println("✅ Cửa đã đóng hoàn toàn!");
cuaDaMo = false;
}
// 🛑 Hàm dừng động cơ
void dungCua() {
digitalWrite(MOTOR_A, LOW);
digitalWrite(MOTOR_B, LOW);
Serial.println("⏹️ Động cơ dừng!");
}
// 🔋 Hàm đo dòng điện động cơ (đơn vị: mA)
float doDongDien() {
float dongDien_A = sensor.getCurrentAC(); // Đo dòng điện (A)
float dongDien_mA = dongDien_A * 1000; // Chuyển đổi sang mA
Serial.print("🔋 Dòng điện: ");
Serial.print(dongDien_mA);
Serial.println(" mA");
return dongDien_mA;
}
// 🔄 Chương trình chính
void loop() {
if (coNguoi()) {
Serial.println("👀 Phát hiện người!");
if (!cuaDaMo) {
moCua();
}
thoiGianKhongPhatHien = millis(); // Reset thời gian đếm ngược
}
if (cuaDaMo && millis() - thoiGianKhongPhatHien > thoiGianmocua) {
dongCua();
}
}
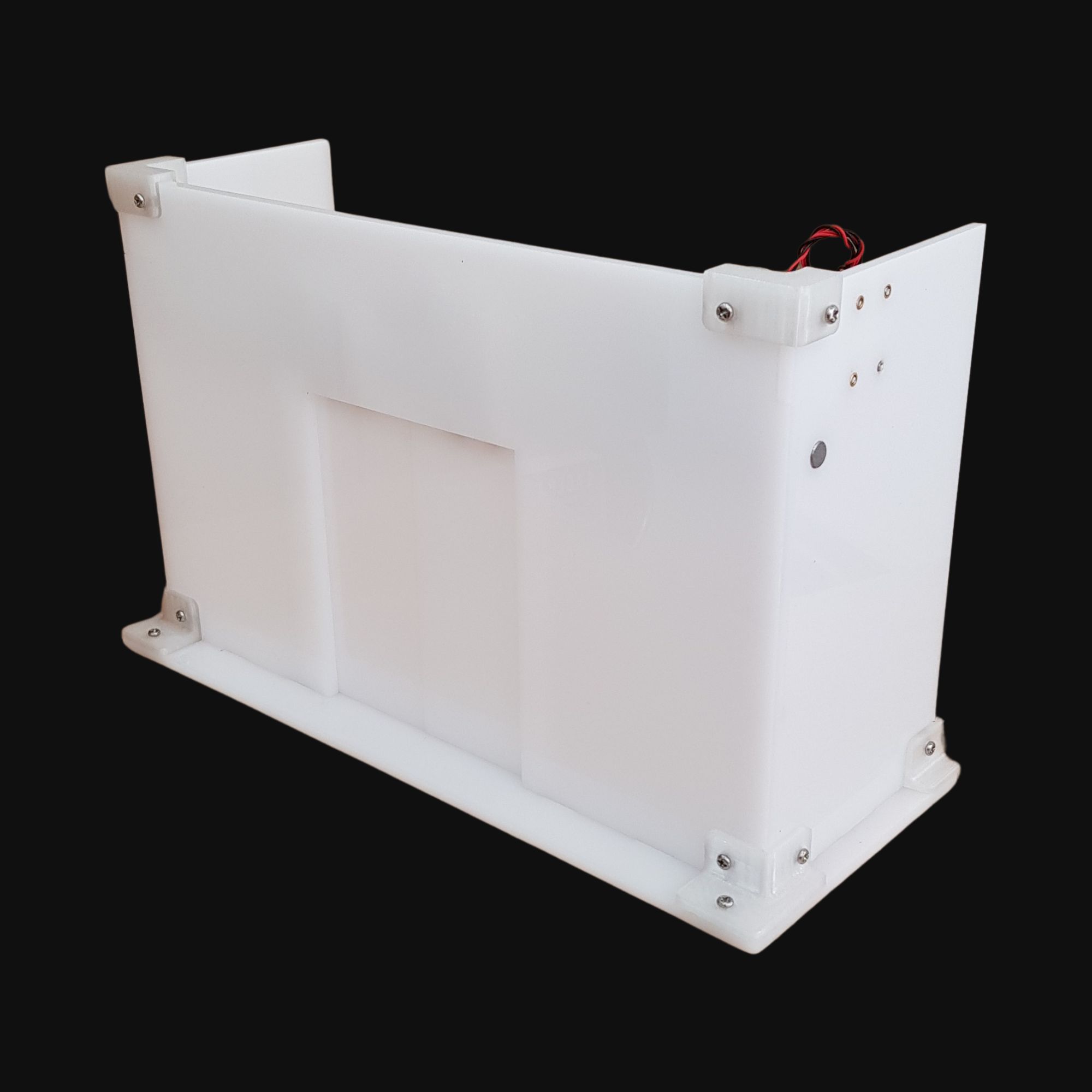
Hình ảnh sản phẩm:
Nshopvn.com · 28/03/2025 4:54 PM
Bộ mô hình tự ráp cửa tự động | giá chỉ 650.000₫